

When Dr Stefan Hrabar switched from CSIRO robotics researcher to company founder, word quickly got out in the industry.
In recent years, the CSIRO has homed in on industrial impact, particularly through spin-outs, wanting to grow its tally of roughly 450.
In 2015, it established an accelerator, CSIRO ON, dedicated to publicly funded technologists with commercially interesting ideas.
A spin-out involves the creation of separate companies from part of an existing firm. One of the early successes of the CSIRO’s push in this space has been Emesent, which began in November 2018 and took a decade-plus of drone autonomy and mapping research to the market.
Its offering is an unmanned aerial vehicle payload that combines automated collision avoidance and mapping for GPS-denied environments.
“We were adding sensors — like cameras, with lidar and radar — to drones, and having onboard computers so they could process that data in real time and make decisions,” recalled Emesent co-founder and CEO Dr Stefan Hrabar of the project’s origins.
“And it [included] collision avoidance and other advanced capabilities. Then in parallel, there was another group in the robotics program who were developing lidar-based navigation techniques.”
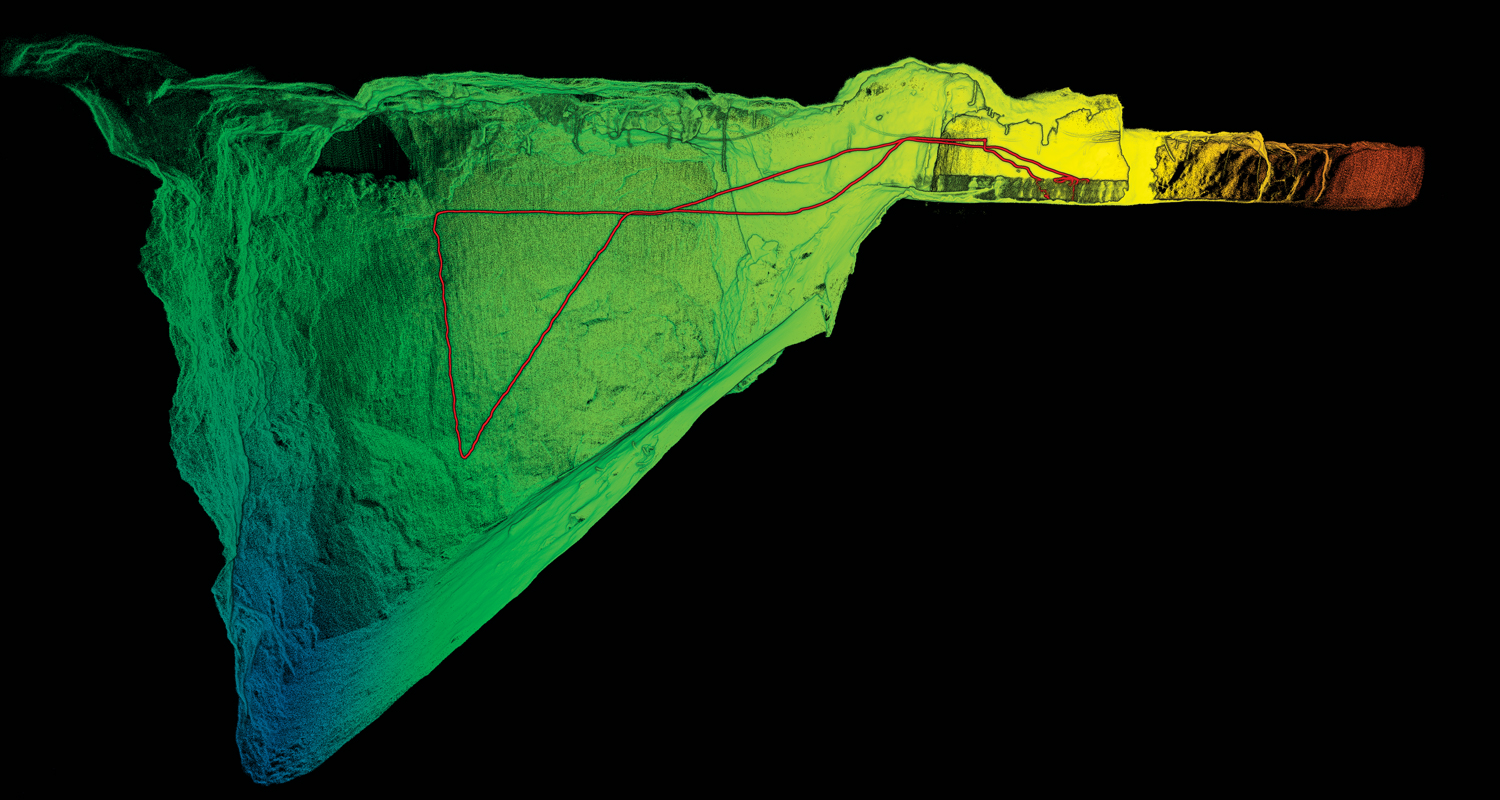
The Hovermap payload also enables a drone operator to do things like collect pictures, record video and measure gas levels in underground mines. It covers all three of the “dull, dirty and dangerous” drivers for automation.
Kendoul and Hrabar considered licensing the intellectual property (IP) out, but decided what they had was too sophisticated and the technology was moving too fast to consider anything but a spin-out.
Constant attention and improvement would be important, and this remains the case.
Currently, there are three levels of autonomy offered: zero autonomy; a level above, which limits velocity while running real-time SLAM and assists the operator; and a level above that, which allows beyond line-of-sight operation using waypoints.
An option for very specific applications such as automated-stop mapping with the press of a button, is planned for release.
The level of IP involved in the spin-out shows “what good looks like”, according to CSIRO ON Program Executive Manager David Burt.
“That’s the difference between someone starting a company in their garage trying to build an app versus the economic opportunity that comes from the commercialisation of research because they have a technical competitive advantage versus everyone else in the world,” Burt told create.

From mechanical engineer to animatronics artist to computer scientist to CSIRO, founding a company in an exciting, fast-moving field is for Hrabar just another new challenge.
So does he miss the “blue sky” aspect of his old role?
“It’s a tough one to balance, because I don’t get a chance to get my hands dirty with code or research, so I definitely do miss that,” he said, before switching to the positives.
“But there’s so much other exciting stuff to go on from a commercial side of things, and I really enjoy being customer-facing, speaking to customers and understanding their problems, and seeing their delight when they see Hovermap doing good things for them, so it compensates.
“It would be great to have a bit more time to do both, but that’s not possible at the moment.”
